
CiTe: A Testbed for Smart City Applications and Architectures
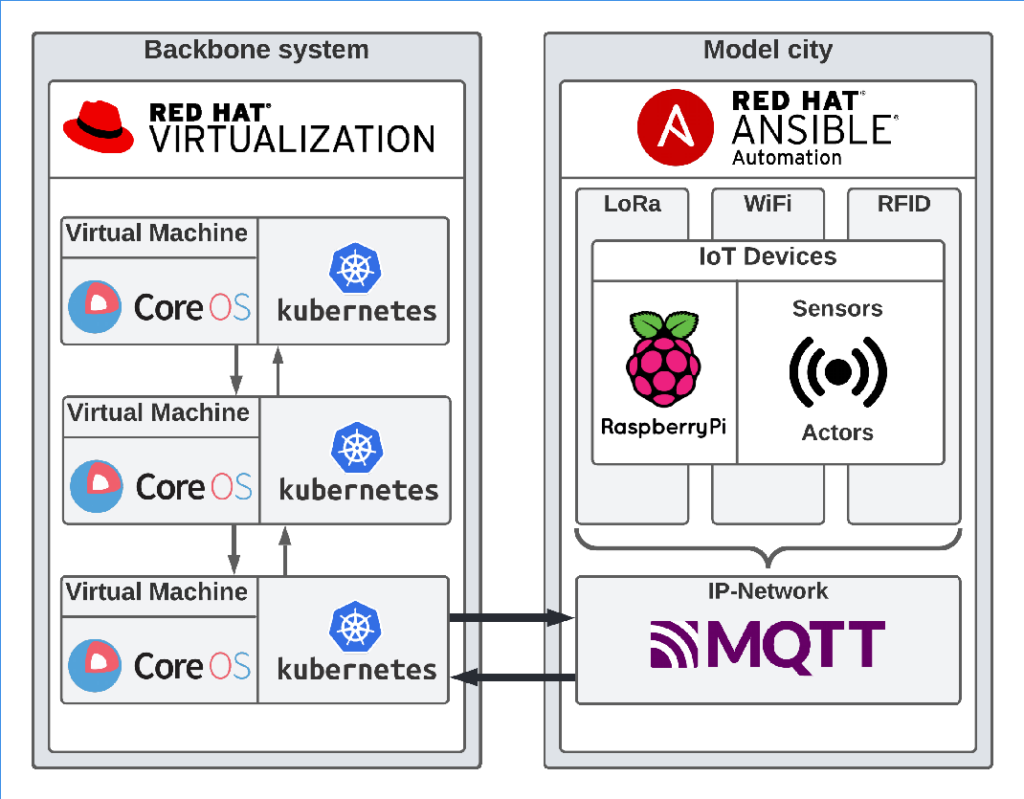
With the continuous development of smart city systems and architectures and their real-world implementation arises the need for a reliable way of verifying their integrity. Most smart city set-ups consist of subsystems derived from the IoT sector, focussing on building sensor networks and powering heterogeneous devices of all shapes and sizes. The IoT industry and research sector have long known the benefits of testing new systems in a controllable, minimal environment. These testbeds have become an integral part of hardware evaluation and embedded-systems development. Testbeds for the Smart City application scenario have to meet their own specific requirements. This paper presents a testbed tailored to smart city research. The testbed is based on a model city with integrated sensors and actuators interconnected by a cloud native back-end architecture. By this means the testbed allows studying modern smart city software architectures and the interplay of real hardware and software. The testbed is fully implemented and in daily use for research projects and university teaching.
Selbstorganisierte Verteilung und Ausführung von Transportaufgaben in einem Multi-Roboter-System
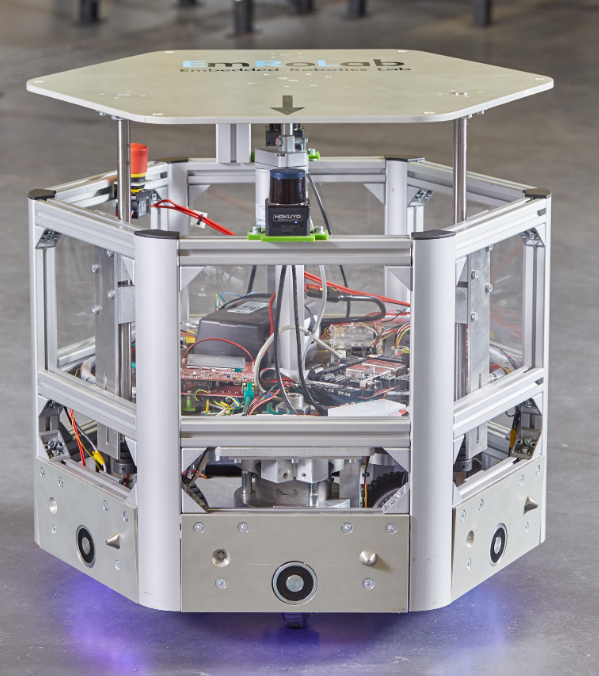
Ein System aus selbstorganisierenden Robotern besteht aus Robotern, die in der Lage sind zu planen, wie anstehende Aufgaben erledigt werden können, ohne dass ein Mensch
vorgeben muss, wie die Roboter bei der Lösung der Aufgaben vorgehen. Es wird das Problem behandelt, wie mehrere Roboter miteinander Kooperieren können, um Aufgaben untereinander zu verteilen und diese effizient durchzuführen. Als Aufgaben werden Transportaufträge betrachtet, bei denen die Roboter Objekte annehmen und zu einer Zielposition transportieren müssen. Die Koordination der Roboter teilt sich in zwei Bereiche auf. Die Roboter müssen selbst entscheiden, wer welche Transportaufträge übernimmt. Hierbei ist das Ziel, dass die Roboter die Aufträge so aufteilen, dass diese so effizient wie möglich ausgeführt werden können. Dazu werden mögliche Optimierungskriterien vorgestellt. Weiterhin müssen die Roboter in der Lage sein, die Ausführung der Transportaufträge untereinander zu koordinieren, damit keine Kollisionen während der Ausführung der Aufträge auftreten. Es werden mehrere Konzepte vorgestellt, mit denen diese Anforderungen umgesetzt werden können. Diese werden miteinander verglichen und bewertet. Am Ende der Thesis werden Prototypen der Konzepte implementiert und bewertet.